The Magnokinetics Emulator addresses both barriers simultaneously through a fundamental re-engineering of the electric powertrain testing platform:

The transition to electrification has created urgent, industry-wide demand for engineers with practical Power Electronics, Machines, and Drives (PEMD) skills. However, traditional laboratory infrastructure presents fundamental barriers to delivering this experience at scale.

THE PROBLEM
Traditional dynamometers operate at hazardous voltages (mains 240V single-phase or 415V three-phase), with heavy, bulky systems requiring substantial floor space and dedicated infrastructure.
The high initial outlay and high-voltage infrastructure requirements make traditional systems financially prohibitive for multi-unit deployment.
The Magnokinetics Emulator addresses both barriers simultaneously through a fundamental re-engineering of the electric powertrain testing platform:
Utilises a 48V DC system to eliminate high-voltage hazards, enabling full, hands-on access for entire teams without complex safety procedures.
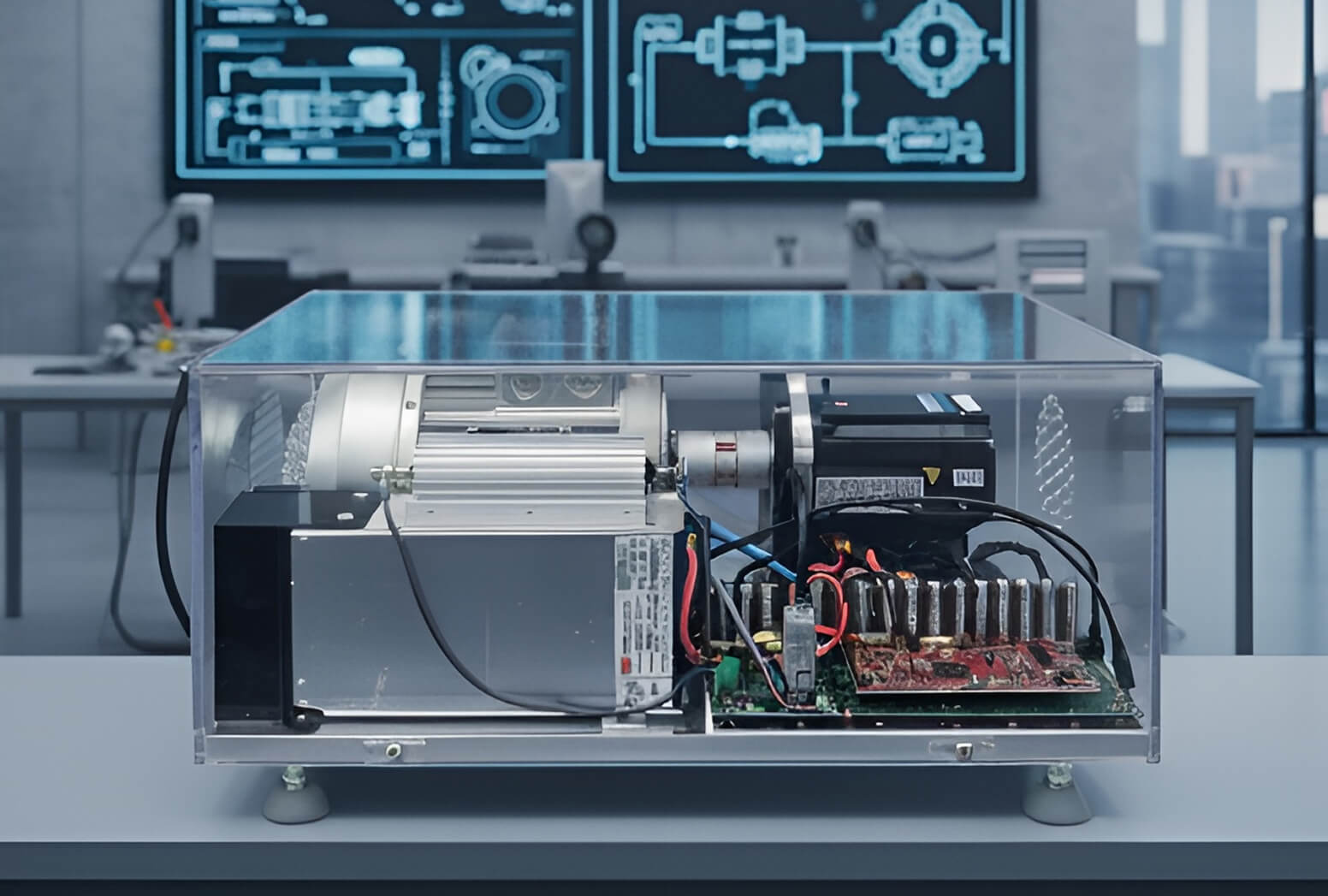
Features a bench-top footprint (50 x 30 x 21 cm, ~27 kg) and cost-effective design that allows for multi-unit laboratory deployment.
Transforms PEMD education from a restrictive, demonstration-based model to a scalable, hands-on, and experiential learning environment.
Systems DEPLOYED
Operated by The UK universities for undergraduate teaching, student projects, and doctoral research.
The platform provides an affordable, repeatable bench testing environment for mission profile emulation and control validation before committing to full-scale integration. This enables rapid iteration and de-risks projects without waiting for expensive dynamometer availability.
This is not a compromise on capability. The platform delivers critical features like 1 kW Power, 100 Arms Current, Advanced FOC, and research-grade instrumentation at a price point that enables deployment at scale.
Engineered for comprehensive visibility and control.
Safety is the architectural foundation, not an afterthought. The system operates at a nominal 48V DC - well below the EU Low Voltage Directive threshold - eliminating the high-voltage electrocution hazards associated with traditional industrial drives. This inherently safe voltage is reinforced by multiple layers of active protection, including a hardware-linked Emergency Stop (E-STOP), Safe Torque Off (STO) logic, and continuous communications heartbeat monitoring.
This architecture removes the need for expensive safety cages or interlock systems, allowing students and engineers to work directly alongside the equipment. The compact footprint combined with the cost-effective design - achieved without compromising performance - finally makes multi-unit deployment financially viable.
Key Capabilities
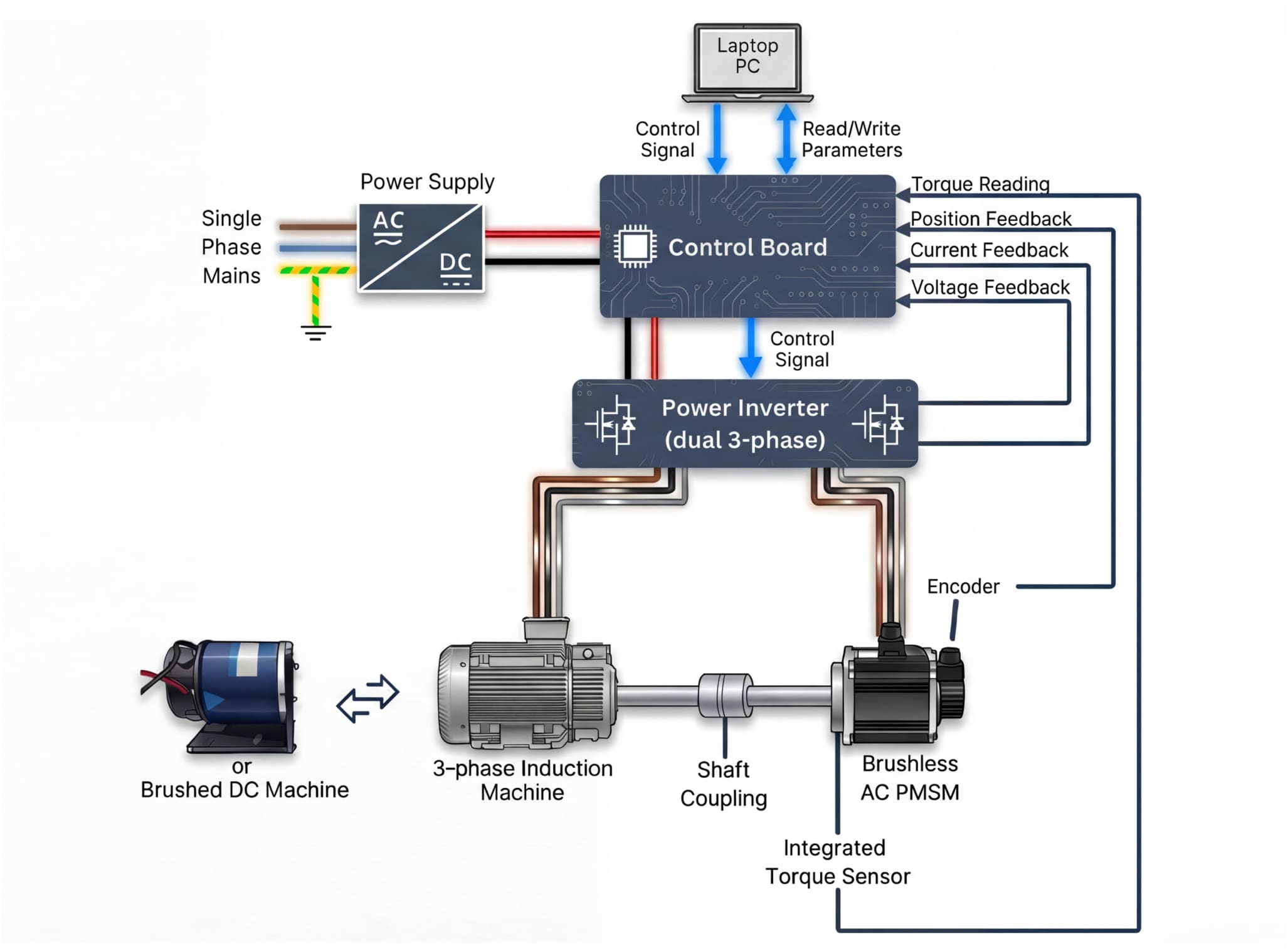
This platform delivers industrial-grade control capability in a compact package. Unlike basic teaching kits, the system provides complete, open-access control algorithms for three distinct electrical machine topologies: Permanent Magnet Synchronous Machine (PMSM), AC Induction Machine (IM), and Brushed DC Machine (BDC).
The PMSM operates under high-fidelity, sensor-based Field-Oriented Control (FOC), enabled by a high-resolution 2500 ppr incremental encoder. To ensure robustness, a mandatory automatic autophasing routine executes at every startup to align the rotor flux vector, ensuring stable operation across the full speed range.
Key Capabilities
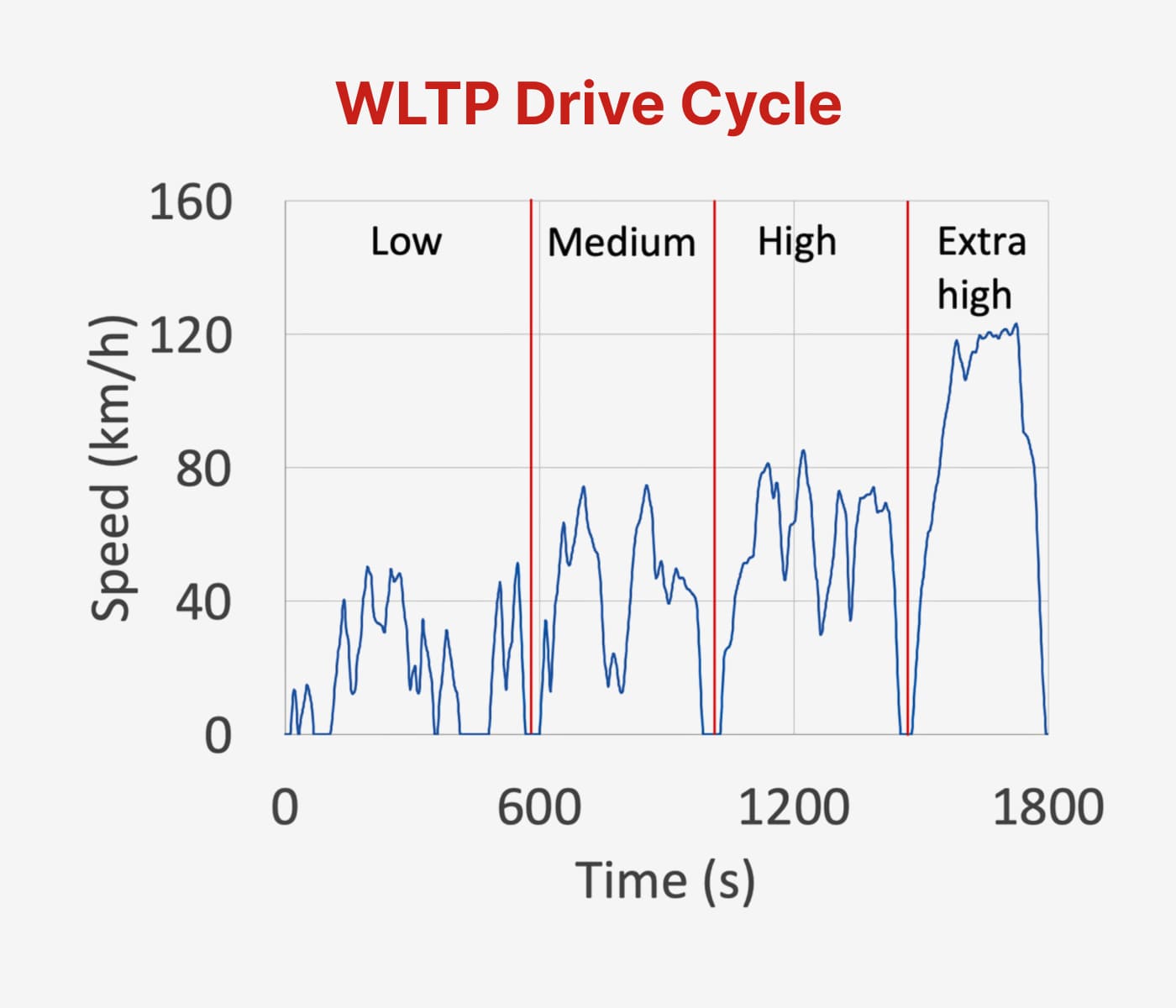
The ability to load and execute custom, time-based speed and torque duty cycles from external files distinguishes this platform as a true electric powertrain emulator. Users can directly load standardised drive cycles (such as WLTP, NEDC, or Artemis) via the Simulink-based host interface.
The platform provides research-grade instrumentation capabilities with a dual-channel communication architecture: a primary low-latency channel for real-time control and a secondary high-bandwidth channel dedicated to data acquisition. This ensures that data logging - for variables such as DC bus voltage, phase currents, speed, and torque - does not compromise the deterministic performance of the control loop.
Key Capabilities
Detailed system parameters.
DC Link Voltage
48V DC (below EU safe voltage threshold)
Nominal Power Output
~1 kW
Power Supply
220V AC to 48V DC PSU (1kW rated)
Phase Current (maximum)
Up to 100 Arms
PWM Switching Frequency
20 kHz
Power Architecture
Recirculation design (supply covers system losses only)
Primary Machine
Permanent Magnet Synchronous Machine (PMSM)
Interchangeable Machines
AC Induction Machine (IM), Brushed DC Machine (BDC)
Machine Reconfiguration
Easy-swap mounting system with precision steel alignment brackets
Dimensions (L × W × H)
50 × 30 × 21 cm
Mass
~27 kg
Baseplate Material
Aluminium (thermal management and portability)
Mounting
Anti-vibration feet for stable bench-top operation
PMSM Control
Onboard sensor-based Field-Oriented Control (FOC) with mandatory autophasing routine; closed-loop speed and torque control with user-tunable PI controller gains
IM/BDC Control
Host-based supervisory control; open-loop (V/f for IM, duty cycle for BDC) or closed-loop speed control with user-tunable PI controller gains
Operating Quadrants
Four-quadrant (motoring & generation, forward & reverse)
Maximum Operating Speed
3000 rpm
Mission Profile Capability
Custom time-based speed and torque duty cycles loaded via external file (e.g., WLTP, Artemis)
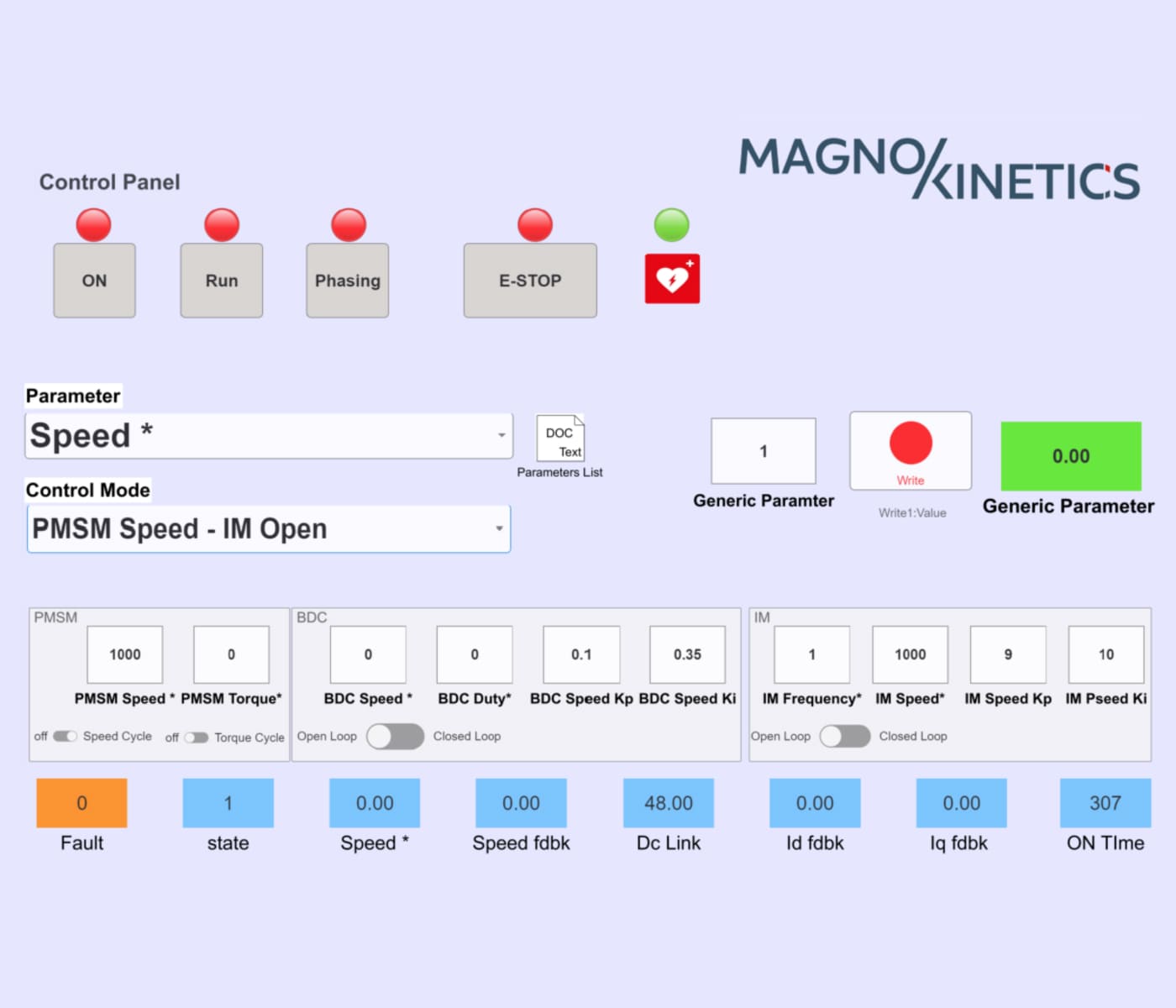
User Environment
Simulink-based host interface
Control Communication
Primary channel via TI XDS drivers
Parameter Access
Extensive controller parameter access (e.g., tunable gains, current/speed/torque limits, mission profiles)
Position Encoder
2500 pulses per revolution (ppr) incremental encoder
Torque Sensor
±10 Nm non-rotating reaction torque sensor
Communication Architecture
Dual independent channels: control (low-latency) + instrumentation (high-bandwidth)
Data Logging
High-speed serial channel with timestamped data capture
Data Export
CSV format for MATLAB, Python, Excel analysis
Real-Time Parameters
Numerous system parameters (e.g., DC bus voltage, speed, torque, encoder position, etc.)
Safety Architecture
Protective Enclosure
6mm impact-resistant polycarbonate cover
Schedule a live, remote demonstration with one of our engineers or request the complete technical datasheet.
Bridge the gap between theoretical models and practical, industry-relevant hardware.
De-risk projects, accelerate development, and upskill engineering teams.

This platform is not theoretical. It is an award-winning (Innovate UK 2025) system, developed through rigorous R&D and adopted by leading engineering institutions.
The University of Warwick (WMG)
University of Sheffield
The University of Southampton
A step-by-step guide to simplify commissioning and ensure correct motor orientation for Field-Oriented Control.
Learn how to upload and execute standard and user-defined duty cycles (e.g., WLTP) for repeatable, real-world test runs.
Discuss your specific requirements, institutional deployment, or request a formal quotation.

